تلاش برای ساخت رباتهای نرم شکلپذیر با بهرهگیری از مواد فعال
تبلیغات


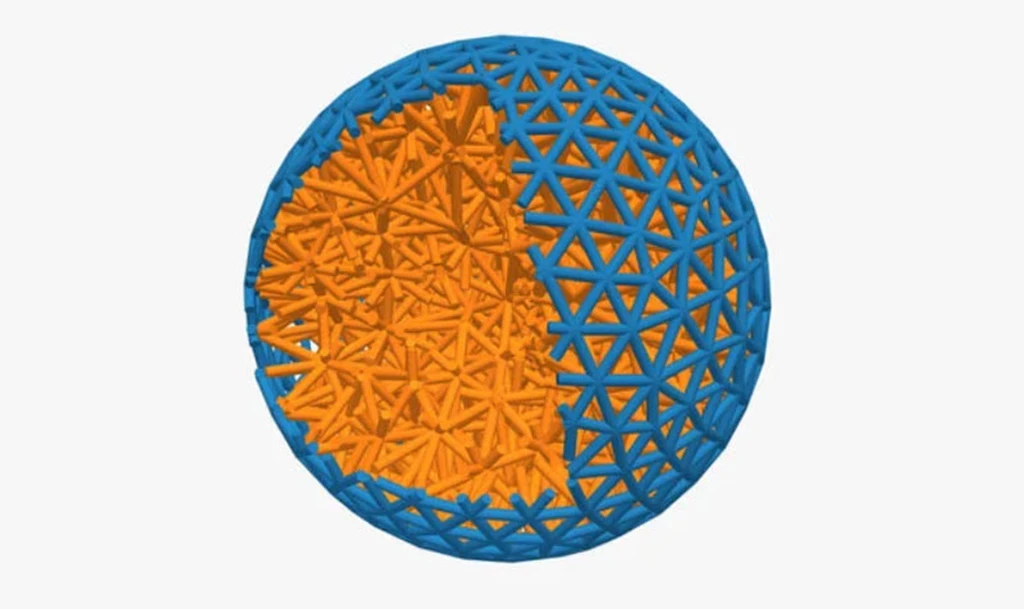
مواد نرم طبیعی همواره طوری درخود فرومیروند که بهشکل کُره درمیآیند. قطرههای آب نیز بههمین سبب مثل دانههای مروارید کُروی هستند. سطح مایعات و دیگر مواد نرم بنا به طبیعتشان، آنقدر فشرده میشود تا کمترین مساحت ممکن را اشغال کند و بههمین علت شکل کُره بهخود میگیرند. اما مواد کنشگر یا فعال (active matter) را میتوان طوری طراحی کرد تا خلاف این رویه عمل کنند. مثلا ریزرُبات یا اصطلاحا نانورُباتی (nano-robot) را تصور کنید که درونش توپی لاستیکی وجود دارد. ریزربات را طوری برنامهریزی میکنند که هماهنگ و یکپارچه با توپ، حالت خود را عوض کند و هر دو مثلا به ستاره تغییر شکل دهند؛ یعنی توپ لاستیکی مثل ماهیچهای عمل میکند که به پوست چسبیده است و هر دو همراه هم تغییرشکل میدهند.
ماده فعال چیست: ماده فعال (active matter) از اجزای خودران یا خودجوشی تشکیل شده است که آن اجزاء، موقعیت یا چینششان را متناسب با تغییرات محیط تغییر میدهند. بافتهای زنده، باکتریها و موتورهای پروتئینی از جمله مواد فعال و خودسامانیابِ طبیعت هستند. آنها برای انجام این کار، انرژی ذخیرهشده یا انرژی آزاد موجود در محیط را بهکار میبرند.
برخی دانشمندان از جمله گروهی از محققان دانشگاه بث (Bath) میکوشند با بهرهگیری از مواد کنشگر رباتهایی بسازند که حرکات و عملکردشان از جزء به کل تسری یابد، یعنی بهجای آنکه هدایتگر مرکزی، ربات را از بیرون هدایت کند، اجزای متعدد و فعال ربات هماهنگ با هم شکل و حرکات کلی ربات را تعیین کنند. بافتهای زیستی از جمله فیبرهای ماهیچه قلب ما همینگونه عمل میکنند.
با کمک این نوع فناوری حتی میتوان نانورباتهای کپسولی ریزی ساخت که با کمک پوشش خارجی فعال و ساختمان شکلپذیرشان، میتوانند از درون رگهای پیچدرپیچ بدن بگذرند و دارو را فقط در محل موردنظر آزاد کنند تا بافتها و سلولهای سالم، کمتر آسیب ببینند.
با استفاده از این فناوری حتی شاید بتوان در آینده پنجههای رباتیک نرم شکلپذیرتری ساخت که اشیاء مختلف را راحتتر بگیرند و راحتتر با آنها کار کنند.
محققان در این پژوهشها با بهرهگیری از نظریهها و شبیهسازیهایی، ماده جامد سهبعدی و نرم مناسب برای این منظور را زمانی که بر سطح آن فشار فعال (active stress) وارد میشود، بررسی کردند. آنها دریافتند که وقتی فشار فعال، سطح ماده را منبسط میکند، ماده جامد درونی نیز همراه آن کشیده میشود و نتیجتاً تمام ماده، یکپارچه تغییرشکل میدهد. محققان همچنین دریافتند که میتوان با ایجاد تغییراتی در ویژگیهای کِشسانیِ ماده جامد نرم، کاری کرد تا آن ماده با دقت بیشتری تغییرشکل دهد.
دانشمندان اکنون میکوشند با توجه بهاین اصل کلی، رباتهای ویژهای مثل بازوهای رباتیک نرم و مواد خودشناگر طراحی کنند. بررسی رفتارهای خاص ایننوع رباتها نیز برای دانشمندان مهم است. مثلا آنها میخواهند بدانند که وقتی جامدات فعال متعددی کنار هم جای میگیرند، چگونه عمل میکنند و چه اتفاقی میافتد.